HANSE - Scanning Sonar Localization
As part of the university team HANSE for the SAUC-E autonomous underwater vehicle challenge, I improved the previously used scanning sonar based localization.
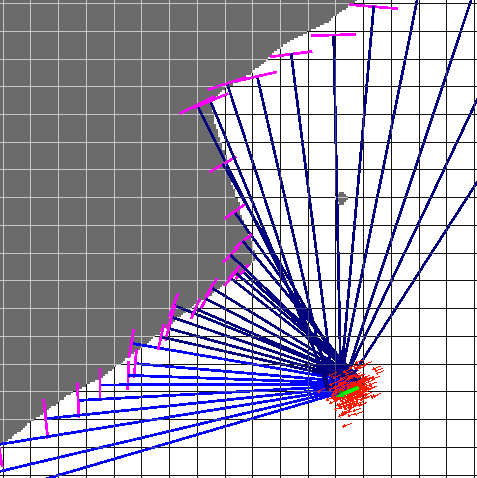
While the previous version required complete 360° scans, each taking a few seconds, the improved version is able to use the sonar data in realtime, greatly improving the localization performance during movements. It is based on a particle filter performing sensor fusion of the scanning sonar, an inertial measurement unit and control data for the thrusters.
The approach is described in more detail in our team paper.